
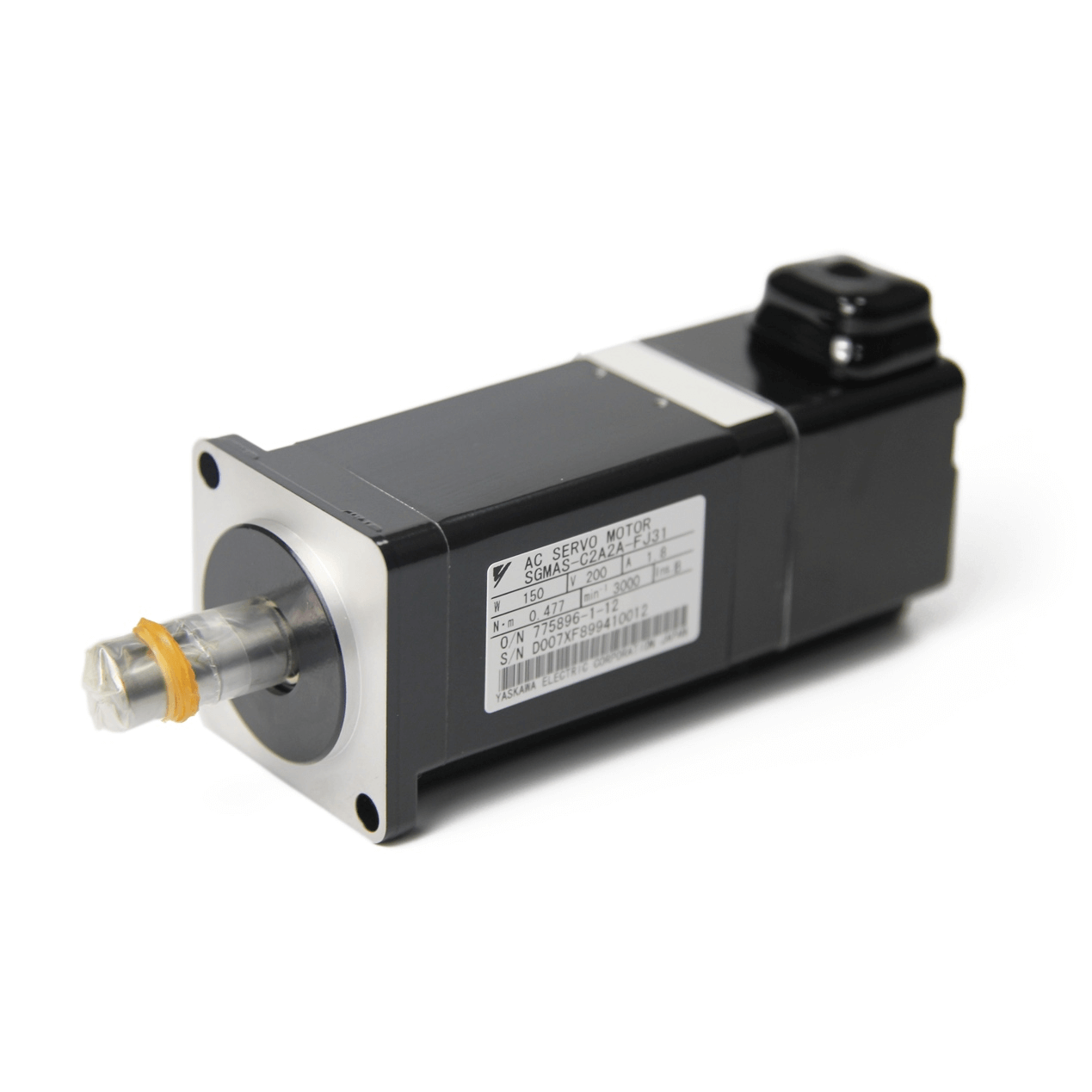
Figure 1 : Le servomoteur est un élément essentiel du système d'asservissement.
Avec le développement des technologies de l’information, de la communication et de l’automatisation, une grande variété de dispositifs de contrôle automatique ont été utilisés dans la production industrielle et dans la vie quotidienne du monde moderne. En tant que l'un des dispositifs de contrôle automatique les plus courants, le système d'asservissement, constitué d'un servomoteur et d'un servomoteur, a été largement utilisé dans notre vie quotidienne.
Avec notre article ici, vous pouvez mieux comprendre où exactement le servomoteur et le servovariateur peuvent être utilisés.
1. Qu'est-ce que le système servo ?
Le système servo est un système de contrôle par rétroaction utilisé pour suivre ou reproduire avec précision un processus.
En tant que l'un des composants clés d'un système d'asservissement et de sa partie exécution, le servomoteur modifie la position, l'orientation, l'état et toute autre quantité contrôlée de sortie de l'objet après l'entrée (ou une valeur donnée).
Sa tâche est d'amplifier, de transformer et de réguler la puissance en fonction des exigences de la commande de contrôle, de sorte que le contrôle du couple de sortie, de la vitesse et de la position du dispositif d'entraînement soit très flexible et pratique.
2. Composants du système servo
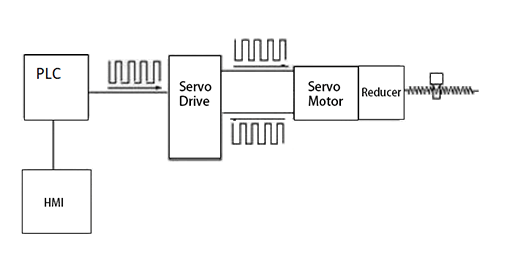
Le système est principalement composé d'un écran tactile HMI, d'un PLC, d'un servomoteur et d'un servomoteur synchrone à aimant permanent. Le servomoteur est le mécanisme exécutif du mouvement. Il effectue le contrôle de position, de vitesse et de courant, afin de répondre aux exigences fonctionnelles de l'utilisateur.
Figure 2:Le système servo est composé d'un PLC, d'un entraînement, d'un moteur, d'un réducteur et d'une interface.
3. Caractéristiques, utilisations et types de système d'asservissement
3.1 CARACTÉRISTIQUES DU SYSTÈME SERVO
Il a besoin d’un dispositif de détection précis pour composer une boucle fermée de vitesse et de position.
Divers principes de rétroaction et de comparaison
Il existe une variété de principes et de méthodes de comparaison des commentaires. Selon les différents principes du dispositif de détection permettant d'obtenir un retour d'information et différentes méthodes de comparaison de retour, la comparaison d'impulsions, la comparaison de phase et la comparaison d'amplitude sont couramment utilisées.
Servomoteur haute performance
Dans les machines-outils à commande numérique destinées au traitement de surfaces efficace et complexe, le système d'asservissement sera souvent en train de démarrer et de freiner fréquemment. Ainsi, le rapport entre le couple de sortie du moteur et le moment d'inertie doit être suffisamment grand pour générer un couple d'accélération ou de freinage important. De plus, le servomoteur doit avoir un couple de sortie suffisamment important à basse vitesse et un fonctionnement fluide, de manière à minimiser le lien intermédiaire dans la connexion avec la partie mécanique mobile.
Système de régulation bien exécuté avec différentes vitesses
Un système avec une large gamme de régulation de vitesse, à savoir un système d'asservissement de vitesse. À partir de la structure de contrôle du système, le système de position en boucle fermée des machines-outils CNC pourrait être considéré comme un système de contrôle automatique à double boucle fermée doté d'un réglage de position dans la boucle externe et d'un réglage de vitesse dans la boucle interne.
Le processus de travail interne réel consiste à convertir l'entrée de position en signal de vitesse correspondant, puis le signal entraînera le servomoteur pour réaliser le déplacement réel. Le mouvement principal des machines-outils CNC nécessite des performances de régulation à grande vitesse, le système d'asservissement doit donc être un système de régulation bien exécuté avec une large plage de vitesse.
3.2 UTILISATIONS DU SYSTÈME SERVO
Contrôlez la charge haute puissance avec un signal d’instruction de faible puissance.
Contrôlé par l'arbre d'entrée pour obtenir une transmission synchrone à distance.
Faire en sorte que le déplacement mécanique de sortie suive avec précision le signal électrique, tel que l'instrument d'enregistrement et d'indication, etc.
3.3 DIFFÉRENTS TYPES DE SYSTÈME SERVO
| Standard | Les types |
| Caractéristique des composants | * Système d'asservissement électrique |
| * Système d'asservissement hydraulique | |
| * Système d'asservissement électro-hydraulique | |
| * Système d'asservissement électrique-électrique | |
| Propriétés physiques de la sortie du système | * Système d'asservissement de vitesse ou d'accélération |
| * Positionner le système d'asservissement | |
| Caractéristiques de la fonction signal | * Système d'asservissement analogique |
| * Système d'asservissement numérique | |
| Caractéristiques structurelles | * Système d'asservissement à boucle unique |
| * Système d'asservissement en boucle ouverte | |
| * Système d'asservissement en boucle fermée | |
| Composants d'entraînement | * Système de servo pas à pas |
| * Système d'asservissement du moteur à courant continu (moteur à courant continu) | |
| * Système d'asservissement du moteur à courant alternatif (moteur à courant alternatif) |
Tableau 1:Différents types de servomoteurs.
4. Industries utilisant le système servo
Domaine de traitement laser
Robotique
Domaine du tour CNC
Équipements bureautiques pour la fabrication de circuits intégrés à grande échelle
Radar et autres domaines de haute technologie
5. Tendances futures de l'application du système d'asservissement
Le système de contrôle automatique se développe non seulement rapidement en théorie, mais évolue également rapidement dans ses dispositifs d'application. Tous les 3 à 5 ans, de nouveaux produits apparaissent sur le marché.
La caractéristique du servomoteur AC traditionnel est douce et sa sortie n'est pas une valeur unique.
Le moteur pas à pas est généralement contrôlé en boucle ouverte et incapable de se localiser avec précision. Le moteur lui-même possède également une région de résonance de vitesse.
Le système de contrôle de vitesse PWM a de mauvaises performances de suivi de position. La régulation de la vitesse de conversion de fréquence est simple mais parfois la précision n'est pas suffisante.
Le système d'asservissement du moteur à courant continu, avec ses excellentes performances, a été largement utilisé dans le système d'asservissement de position. Mais ses inconvénients, tels qu'une structure compliquée, la contradiction saillante dans la zone morte à très basse vitesse, et la brosse inversée entraîneront des problèmes de bruit et de maintenance.
Le nouveau servomoteur AC à aimant permanent se développe rapidement, en particulier lorsqu'il a changé le mode de contrôle de l'onde carrée à l'onde sinusoïdale. Les performances du système sont meilleures et sa plage de vitesse est large, avec des performances supérieures à vitesse lente.
Heure de publication : 10 février 2022






